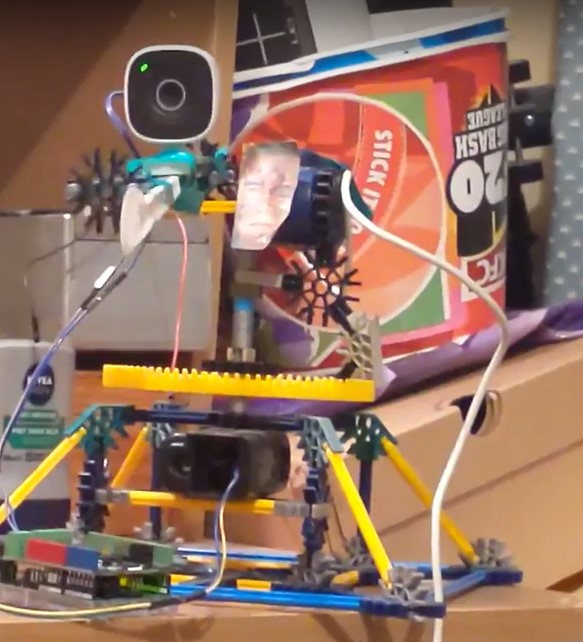
Runs off matlab’s computer vision toolbox. It detects a face via the mounted webcam and then moves the turret to centre the face in the camera. The motors are drive by an arduino and is built from a k’nex set . Still in progress to smoothen movement using PID. The motivation was that I saw Michael Reeves make one and I wanted one too.